Rest bus simulation CAN scripting API
Contents
Prerequisites
Create a new project and configure the Hardware device(s) as a first step.
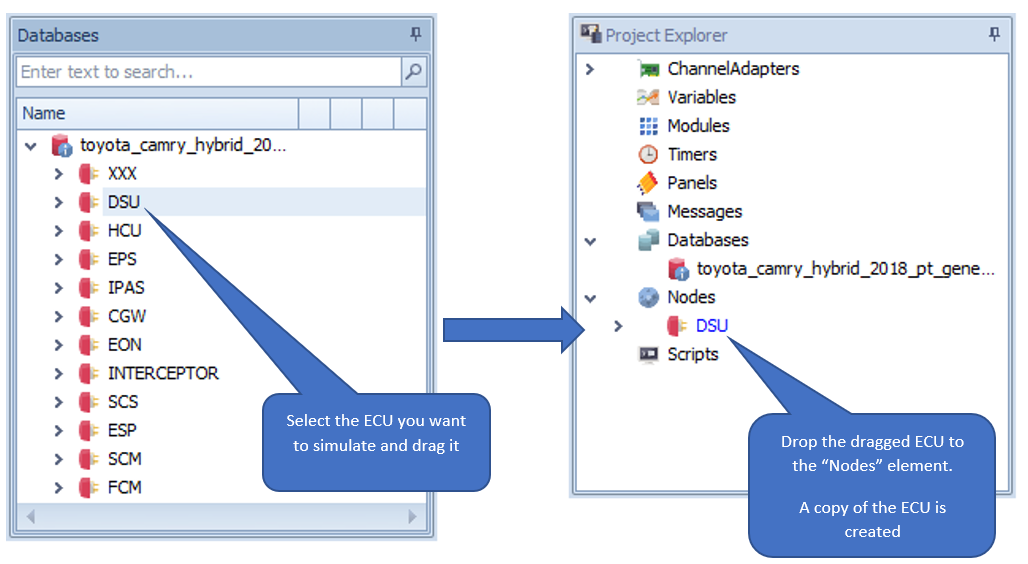
Creating nodes by Drag and Drop
After adding a CAN database, drag and drop an ECU to the Nodes element.
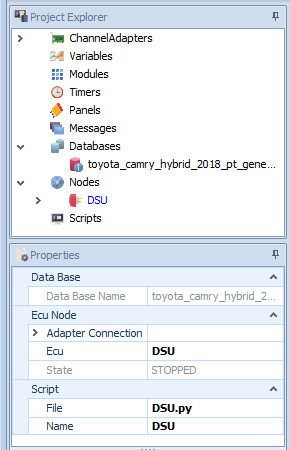
Node properties
Select the created ECU node and open the Properties View to show and change the adjustments to simulate the ECU:
Sender and Receiver.
Enable and disable frames
By default all frames of the ECU node are deactivated, i.e. after the creation of a node the frames needed for the simulation must be activated.
Each frame has an
enableflag in properties, which specifies whether it is activated or not.
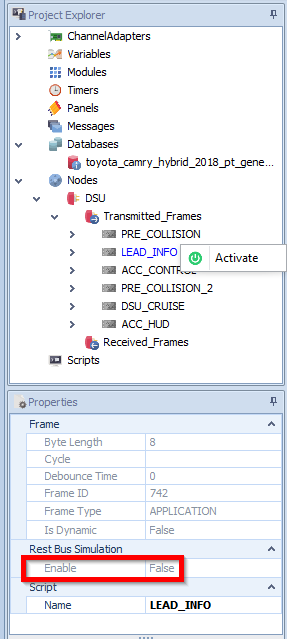
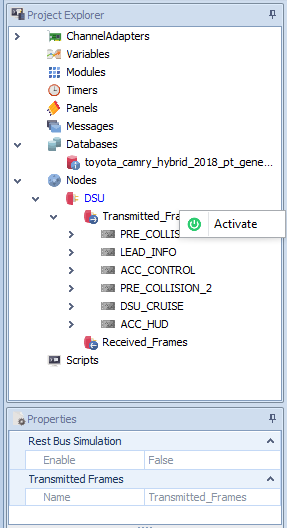
In order to activate all frames, right click on the
transmitted_Framesand/ orreceived_Frameselement and selectActivate.
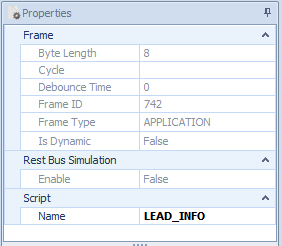
Properties of a frame
Each frame has further information which is read out of the CAN database file and is used during the simulation.
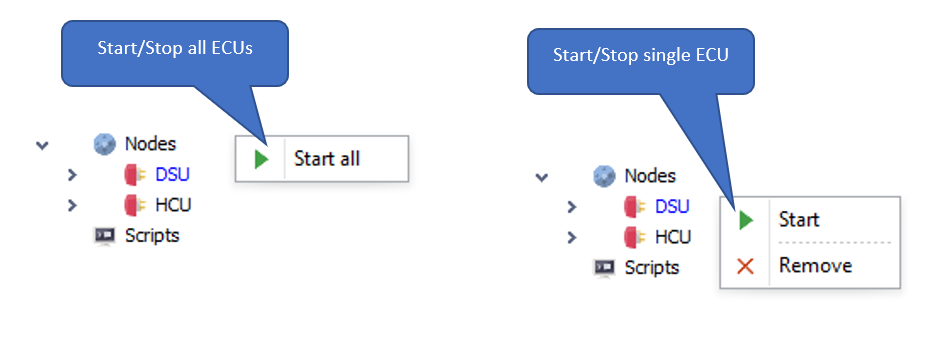
Starting and stopping ECU nodes
There are three ways on how to start and stop ECU nodes:
Start all ECU nodes via context menu of
Nodeselement.Start only one ECU node via context menu of an ECU node.
3. Start Nodes in scripts.
# start individual node using its name
DSU.start()
# stop individual node using its name
DSU.stop()
# iterate over all nodes and start/stop them
for ecu in tc_get_all_ecus():
ecu.start()
Example using get_value(), set_value() and reset_value() methods
from time import sleep
# enable a frame using frame name
DSU.enable("ACC_HUD")
# enable a frame using frame identifier
DSU.enable("742")
# enable all frames of the ECU
DSU.enable("*")
DSU.start()
##################################################################
# Get Value #
##################################################################
### 1- get_value(frame : str)###
# get value of all signals of a frame using frame name
DSU.get_value("LEAD_INFO")
# get value of all signals of a frame using frame identifier
DSU.get_value("742")
### 2- get_value(frame : str, signal : str)###
# get value of one signal of a frame using frame name
DSU.get_value("LEAD_INFO", "LEAD_REL_SPEED")
# get value of one signal of a frame using frame identifier
DSU.get_value("742", "LEAD_REL_SPEED")
##################################################################
# Set Value #
##################################################################
### 1- set_value(frame : str, value : IDictionary)###
# set multiple signals using frame name
DSU.set_value("LEAD_INFO", {"LEAD_REL_SPEED": 2, "LEAD_LONG_DIST": 3})
# set multiple signals using frame identifier
DSU.set_value("742", {"LEAD_REL_SPEED": 2, "LEAD_LONG_DIST": 3})
# set multiple signals without knowing the name of the frame
DSU.set_value("*", {"LEAD_REL_SPEED": 2, "LEAD_LONG_DIST": 3})
# set a signal with None will reset its value
DSU.set_value("ACC_HUD", {"FCW": None, "SET_ME_X20": 6})
### 2- set_value(frame : str, signal : str, value : int or None)###
# set a signal using frame name
DSU.set_value("LEAD_INFO", "LEAD_REL_SPEED", 2)
# set a signal using frame identifier
DSU.set_value("742", "LEAD_REL_SPEED", 2)
# set a signal without knowing the name of the frame
DSU.set_value("*", "LEAD_REL_SPEED", 2)
# set a signal with None will reset its value
DSU.set_value("ACC_HUD", "FCW", None)
##################################################################
# Reset Value #
##################################################################
# reset one signal using frame name
DSU.reset_value("LEAD_INFO", "LEAD_REL_SPEED")
# reset one signal using frame identifier
DSU.reset_value("742", "LEAD_REL_SPEED")
# reset a signal without knowing the name of the frame
DSU.reset_value("*", "FCW")
# Reset all signal values of a frame
DSU.set_value("ACC_HUD", None)
DSU.reset_value("ACC_HUD", "*")
DSU.reset_value("ACC_HUD")
# reset all signals of all frames
DSU.reset_value()
DSU.reset_value("*", "*")
# disable a frame using frame name
DSU.disable("ACC_HUD")
# disable a frame using frame identifier
DSU.disable("742")
# disable all frames of the ECU
DSU.disable("*")
DSU.stop()
Example using trigger() method
from time import sleep
# enable frame LEAD_INFO
DSU.enable("LEAD_INFO")
print("Starting RBS node using the start() method")
DSU.start()
sleep(2)
# set value of signal LEAD_REL_SPEED.
DSU.set_value("LEAD_INFO", "LEAD_REL_SPEED", 1)
print("triggering frame")
DSU.trigger("LEAD_INFO")
sleep(2)
# disable frame LEAD_INFO
DSU.disable("LEAD_INFO")
# stop DSU
DSU.stop()
Example using on_value_changed() method
from time import sleep
# --- variables
nb = 0
# --Functions
def on_value_changed(ecu, evt):
global nb, evt_name, old_val, new_val
# print evt
if evt.match("LEAD_INFO"):
print(evt.message_name)
evt_name = evt.message_name
print("old value")
print(evt.old_value)
old_val = evt.old_value
print("new value")
print(evt.new_value)
new_val = evt.new_value
nb = nb + 1
# Enable the frame LEAD_INFO
DSU.enable("LEAD_INFO")
HCU.enable("LEAD_INFO")
print("Starting RBS node using the start() method")
DSU.start()
HCU.start()
sleep(2)
value = {"LEAD_REL_SPEED": 2, "LEAD_LONG_DIST": 3}
HCU.on_value_changed += on_value_changed
DSU.set_value("LEAD_INFO", value)
DSU.trigger("LEAD_INFO")
sleep(2)
# disable the frame LEAD_INFO
DSU.disable("LEAD_INFO")
HCU.disable("LEAD_INFO")
# stop the ecus
DSU.stop()
HCU.stop()